
Overview
Welcome to the main page of the Control and Computer Systems Research Group (CCSRG). We are one of the nine research groups at the School of Electrical Engineering and Informatics, Institut Teknologi Bandung (ITB). This Research Group is currently led by Prof. Dr. Ir. Bambang Riyanto Trilaksono. The group's research focuses on control theory, real-time applications and implementation, modeling & simulation, intelligent systems, and robotics.
The Control and Computer Systems Research Group at ITB was established in the 1970s to address the emerging fields of control and computer systems, which had gained significant attention by the mid-1960s. Since the 1970s, control and computer systems have been taught from the 2nd to the 4th year of the undergraduate program and from the 1st to the 2nd year of the Master’s program at ITB. CCSRG has also established the Advanced Robotics Research Laboratory. Currently, CCSRG is home to 10 (ten) faculty members and approximately 30 Master’s and Doctoral students.
CCSRG takes great pride in the quality of its education, strong research activities, and industry partnerships by providing consulting, training, prototyping, and product design in the fields of control, computing, simulation, mechatronics, and robotics. CCSRG collaborates with the Robotics Research Laboratory, the Control and Computer Systems Laboratory, and the Center for Unmanned Systems Studies.
Vision and Mission
Vision
Developing its human resources to achieve ITB’s academic excellence and to fulfill its role as a national agent of change.
Mission
- Mengkoordinasikan kegiatan pendidikan untuk program sarjana dan pascasarjana, penelitian dan kegiatan pemberdayaan masyarakat.
- Menciptakan pemikir yang brilian dan unggulan, pendidik, peneliti, dengan keunggulan dalam kepemimpinan dan kewirausahaan. Juga untuk menciptakan insinyur yang memiliki nilai tambah tenaga kerja.
Responsibility
- Mengkoordinasikan kegiatan pendidikan untuk program sarjana dan pascasarjana, penelitian dan kegiatan pemberdayaan masyarakat.
- Meningkatkan dan mengembangkan ilmu pengetahuan dan teknologi dalam bidang Teknik Kendali dan Teknik Komputer.
- Mengembangkan sumber daya manusia, untuk menjadi kompetensi dalam bidang Teknik Kendali dan Teknik Komputer.
Objective
- Untuk menjadi bagian strategis dari ITB dalam mencapai misi dan visinya.
- Untuk menjadi pusat pengembangan sumber daya manusia, yang sangat kompeten.
- Untuk membangun lingkungan kerja yang baik dan harmonis.
- Untuk mengembangkan rencana terpadu dan berkelanjutan jangka pendek dan jangka panjang.
Head of Research Group:
Prof. Dr. Ir. Bambang Riyanto Trilaksono
Member:
1. Robotics and Autonomous Systems
Autonomous systems; Robots and multi-robot systems; Human-robot interaction; Robust multi-agent coordination; Autonomous vehicles.
2. Control and Linear-Nonlinear Systems
Control systems; Dynamic system model identification; Biomimetic modeling, dynamics, and control.
3. Data-Driven and Intelligent Control & Systems
Intelligent control systems; Optimal state estimation and control; Problem-solving agents with search algorithms; Knowledge-based agents, planning, reasoning; Learning agents; Computer vision; Data mining; Decision support systems; Digital forensics; IoT data analytics.
4. Cyber-Physical Systems, Industrial Control, and Automation
Network science and distributed control theory; Wireless sensor networks; Factory automation; Industrial instrumentation; Fault diagnosis; Optical fiber devices and subsystems; Systems and graphical interfaces; Embedded and cyber-physical systems; Distributed algorithms and programming languages; Cloud computing; Human-computer interaction.
5. Electric Vehicles and Mechatronics
Intelligent transportation systems; Electric power control; Electric vehicles; On-board signal processing; Government technology policy.
1. Mobile Robot : AMIGO

The Omron Adept AmigoBot is a small, durable, and versatile differential-drive mobile robot platform. The robot operates on the standard ROS (Robot Operating System), can receive motion commands in Matlab, Python, and Java, and provides data via a wireless connection (WiFi, IEEE 802.11).
2. Mobile Robot : PIONEER


The Pioneer 3-AT is a small, four-wheel, four-motor skid-steer robot that is ideal for all-terrain operations or laboratory experiments. The Pioneer 3-AT is equipped with a battery, an emergency stop switch, wheel encoders, and a microcontroller with ARCOS firmware, as well as the advanced Pioneer SDK mobile robotics software development package.
The Pioneer research robot is the world’s most popular intelligent mobile robot for education and research. Its versatility, reliability, and durability have made it the platform of choice for advanced intelligent robotics. The Pioneer comes pre-assembled, is customizable and upgradeable, and is rugged enough to withstand years of use in laboratories and classrooms.
3. Mobile Robot : SEEKUR


Seekur is a large, all-weather robot capable of traversing rough terrain. Its four independently controlled wheels enable omnidirectional steering capabilities. Seekur can be easily equipped with heavy payloads supported by power and I/O accessibility. Choose from available accessories or easily mount your own custom instruments.
The base robot comes equipped with a battery pack and charging system, segmented bumper array, emergency stop switch, remote control unit, and a microcontroller with SeekurOS robot control firmware, along with the advanced Pioneer SDK mobile robotics development software.
Adept MobileRobots research robots are among the most popular intelligent mobile platforms in the world for education and research. Their versatility, reliability, and durability have made them the platform of choice for advanced intelligent robotics.
4. Humanoid Robot : NAO
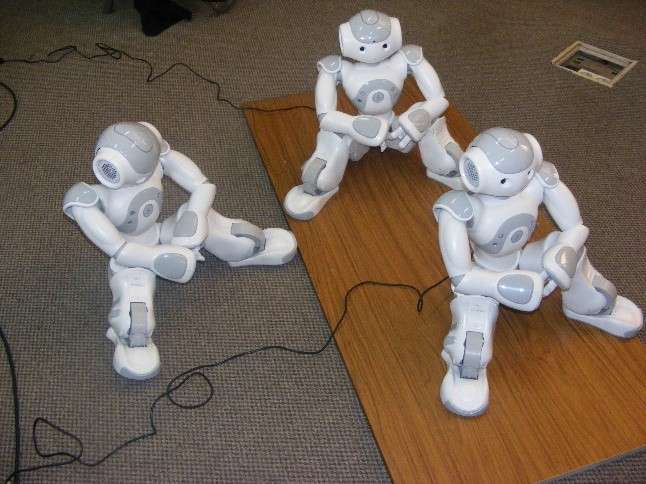

NAO is a small humanoid robot designed to interact with humans. It is packed with sensors (and personality) and can walk, dance, speak, and recognize faces and objects. Now in its sixth generation, it is used in research, education, and healthcare worldwide.
5. Autonomous Underwater Vehicle (AUV)

An autonomous underwater vehicle (AUV) is a robot that operates underwater without requiring input from an operator. AUVs are part of a larger group of underwater systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated vehicles (ROVs) — which are controlled and powered from the surface by an operator/pilot via a tether or remote control. In military applications, AUVs are more commonly referred to as unmanned undersea vehicles (UUVs). Underwater gliders are a subclass of AUVs.
6. Unmanned Ground Vehicle (UGV) – Unmanned Aerial Vehicle (UAV)

An unmanned ground vehicle (UGV) is a vehicle that operates on the ground without a human onboard. UGVs can be used for many applications that may be inconvenient, dangerous, or impossible for a human operator. Typically, the vehicle is equipped with a set of sensors to observe the environment and either makes decisions about its behavior autonomously or transmits the information to a human operator at a remote location who controls the vehicle via teleoperation.
An unmanned aerial vehicle (UAV), commonly known as a drone, is an aircraft without a human pilot, crew, or passengers onboard. UAVs are components of an unmanned aircraft system (UAS), which also includes a ground-based controller and a communications system with the UAV. UAV flights can be remotely controlled by a human operator as remotely piloted aircraft (RPA), or they can operate with varying levels of autonomy, from autopilot assistance to fully autonomous aircraft with no provision for human intervention.
As control technology advances and costs decrease, the use of UGVs and UAVs has expanded into many non-military applications. These include wildfire monitoring, aerial photography, product delivery, agriculture, policing and surveillance, infrastructure inspection, science, smuggling, and drone racing.
7. Batch Distillation Column

Distillation is a method used to separate a chemical substance from its solvent. This is made possible by differences in boiling points and/or vapor pressures between the chemical substances. The distillation process itself takes place in a distillation column. The difference in vapor pressure between the substance and the solvent at a given temperature drives a vapor-liquid equilibrium, causing the concentration of the substance in the solvent to change.
This image shows a distillation case study as presented in the Control Laboratory of STEI-ITB: a Batch Distillation Column (by BR Instrument). It represents one of the simplest distillation processes and is therefore commonly used in school laboratories. Since control systems are a branch of electrical engineering aimed at managing processes or plants to help achieve specific outcomes, several control methods/algorithms are applied to this mini batch distillation column to assist in the simple separation of a mixture containing a substance and a solvent.
8. Process Instrumentation Trainer

There are four main physical quantities widely used across various industries: level, flow rate, pressure, and temperature.
The Process Instrumentation Trainer device (by Feedback Instrument), available in the Control Laboratory at STEI-ITB, is used to facilitate electrical engineering students in learning the application of control methods in real-life industrial processes. For example, this modular device can be configured into a high-level control system. Students can apply simple control methods (such as PID) by tuning PLC parameters and checking whether the implemented control method functions properly (maintaining the water level at a specified setpoint).
9. Visual Tracking System
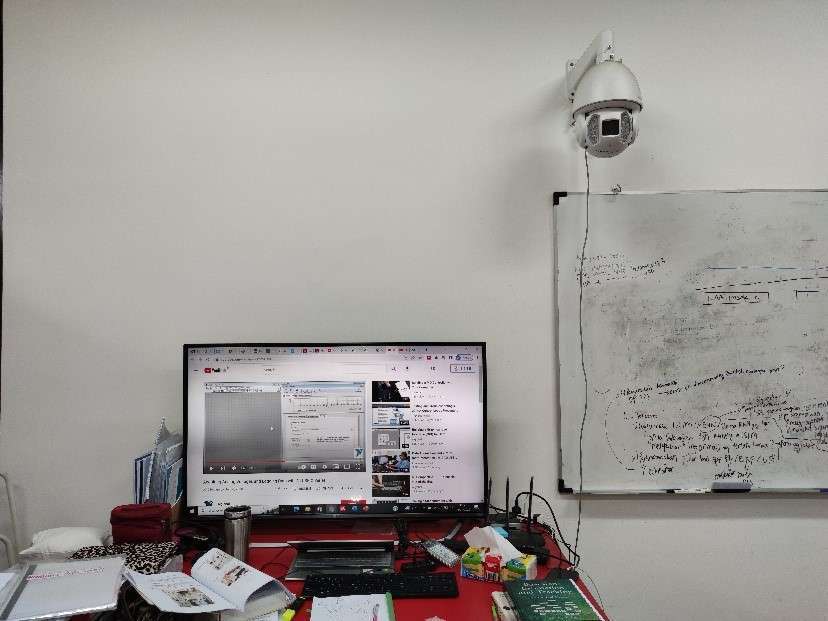
The Visual Tracking System consists of a pan-tilt platform and a camera, where images are processed using a computer (assisted by a Graphics Processing Unit), and movement actions are determined by the control method implemented within the microcontroller.
Previous work has been conducted in face detection and tracking, dedicated object trackers, combinations of face and posture for human tracking, and combinations of machine-based image processing methods that can be applied to track healthcare-related objects. Various deep learning methods and feature extraction techniques are used to process images. Current research focuses on a new Motion Distance Score developed to account for object displacement when tracking target objects.
- Perception and Path Planning System for Autonomous Vehicles
- Hybrid Underwater Glider for Maritime Exploration and Surveillance
- UAV-UGV Coordination for Monitoring Gas-Contaminated Areas
- Wireless Sensor Network and Multi-Agent System for Bridge Health Monitoring
- Multimodal Fusion Algorithm and Reinforcement Learning-Based Dialogue System in Human-Machine Interaction
- Particle Filter-Based Single Shot MultiBox Detector for Predicting Human Movement
- Sensor Fusion and Machine Learning Approach for Tsunami Prediction in a Tsunami Early Warning System
- Development of an Autonomous Forklift for Industrial Use
- Bioreactor System for the Production of Liquid Biofertilizer
- Autonomous Tram System: An Innovative Collaboration between ITB and INKA
BUMN
- PT. Industri Kereta Api Indonesia (PT. INKA)
- PT. PINDAD
- PT. Len Industri
- PT. Patra Niaga Pertamina
- PT. Pertamina
- PT. Pupuk Kujang Cikampek
Higher Education Institution
Government
- Ministry of Health
- Meteorology, Climatology, and Geophysical Agency
- Research and Innovation Agency of Badung, Bali
Industry
- PT. Riset Kecerdasan Buatan (PT. RKB)
- PT. Charoen Pokphand Indonesia (PT. CPI)
- PT. Robo Marine Indonesia (PT. RMI)
- Bank Indonesia (Kerma dgn LAPI)
- PT VKTR
- PT. Toyota Motor Manufaktur Indonesia (PT. TMMIN)
- PT. Toyota Astra Motor (PT TAM)
- T. HINO Motor SALES Indonesia
- PT. CARSURIN Tbk
- PT. HIOKI Indonesia (PMA)
- PT. Kendaraan Listrik Nusantara (KLN)
- PT. Insera Sena (Polygon e-bike)
|
1 |
Prof. Dr. Ir. Bambang Riyanto Trilaksono | Scopus | Sinta | Google Scholar |
|
2 |
Dr.Ir. Hilwadi Hindersah, M.Sc. | Scopus | Sinta | Google Scholar |
|
3 |
Dr.Ir. Dimitri Mahayana, M.Eng. | Scopus | Sinta | Google Scholar |
|
4 |
Ir. Arief Syaichu Rohman, M.Eng.Sc., Ph.D | Scopus | Sinta | Google Scholar |
|
5 |
Dr. Pranoto H. Rusmin, S.T., M.T. | Scopus | Sinta | Google Scholar |
|
6 |
Dr. Agung Harsoyo, S.T., M.Sc. | Scopus | Sinta | Google Scholar |
|
7 |
Egi Muhammad Idris Hidayat, S.T., M.Sc., Ph.D. | Scopus | Sinta | Google Scholar |
|
8 |
Dr. Lenni Yulianti, S.T., M.T. | Scopus | Sinta | Google Scholar |
|
9 |
Yulyan Wahyu Hadi, S.T., M.T. | Scopus | Sinta | Google Scholar |
|
10 |
Anggera Bayuwindra, S.T., M.T., Ph.D. | Scopus | Sinta | Google Scholar |
|
11 |
Indra Sihar, S.T., M.Sc., Ph.D. | Scopus | Sinta | Google Scholar |