
Sekilas
Selamat datang di halaman utama Control and Computer Systems Research Group (CCSRG). Kami adalah salah satu dari sembilan kelompok penelitian di Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung (ITB). Kelompok Keahlian ini saat ini dipimpin oleh Prof. Dr. Ir. Bambang Riyanto Trilaksono. Penelitian kelompok berfokus pada teori kontrol, aplikasi dan implementasi waktu nyata, pemodelan & simulasi, sistem cerdas, dan robotika.
Kelompok Riset Sistem Kontrol dan Komputer di ITB didirikan pada tahun 70-an untuk menangani bidang baru kontrol dan sistem komputer, yang pada pertengahan tahun 1960-an mendapat banyak perhatian. Sejak tahun 1970-an, sistem kendali dan komputer telah diajarkan pada tahun ke-2 hingga ke-4 program sarjana, dan tahun ke-1 hingga ke-2 program Magister di ITB. CCSRG juga telah mendirikan Laboratorium Penelitian Robotika Tingkat Lanjut. Dan saat ini CCSRG menampung 10 (sepuluh) dosen dan kurang lebih 30 mahasiswa S2 dan S3.
CCSRG sangat bangga dengan kualitas pendidikan, kegiatan penelitian yang kuat dan hubungan dengan industri dengan memberikan konsultasi, pelatihan, pembuatan prototipe dan merancang produk di bidang kontrol, komputer, simulasi, mekatronik dan robotika. CCSRG bekerja sama dengan Laboratorium Penelitian Robotika, Laboratorium Kontrol dan Sistem Komputer dan Pusat Studi Sistem Tak Berawak.
Visi dan Misi
Visi
Mengembangkan sumber dayanya untuk mencapai keunggulan akademik ITB dan mewujudkan perannya sebagai agen perubahan nasional.
Misi
- Mengkoordinasikan kegiatan pendidikan untuk program sarjana dan pascasarjana, penelitian dan kegiatan pemberdayaan masyarakat.
- Menciptakan pemikir yang brilian dan unggulan, pendidik, peneliti, dengan keunggulan dalam kepemimpinan dan kewirausahaan. Juga untuk menciptakan insinyur yang memiliki nilai tambah tenaga kerja.
Tanggung Jawab
- Mengkoordinasikan kegiatan pendidikan untuk program sarjana dan pascasarjana, penelitian dan kegiatan pemberdayaan masyarakat.
- Meningkatkan dan mengembangkan ilmu pengetahuan dan teknologi dalam bidang Teknik Kendali dan Teknik Komputer.
- Mengembangkan sumber daya manusia, untuk menjadi kompetensi dalam bidang Teknik Kendali dan Teknik Komputer.
Tujuan
- Untuk menjadi bagian strategis dari ITB dalam mencapai misi dan visinya.
- Untuk menjadi pusat pengembangan sumber daya manusia, yang sangat kompeten.
- Untuk membangun lingkungan kerja yang baik dan harmonis.
- Untuk mengembangkan rencana terpadu dan berkelanjutan jangka pendek dan jangka panjang.
Ketua KK:
Prof. Dr. Ir. Bambang Riyanto Trilaksono
Anggota:
1. Robotika dan Sistem Otonom
Sistem otonom; Robot dan sistem multi-robot; Interaksi manusia dan robot; Koordinasi multi-agen yang tangguh; Kendaraan otonom.
2. Kontrol dan Sistem Linier-Nonlinier
Sistem kontrol; Identifikasi model sistem dinamis; Pemodelan biomimetik, dinamika, dan kontrol.
3. Kontrol & Sistem Berbasis Data dan Cerdas
Sistem kontrol cerdas; Estimasi dan kontrol keadaan yang optimal; Agen pemecahan masalah dengan algoritma pencarian; Agen berbasis pengetahuan, perencanaan, penalaran; Agen pembelajaran; Visi komputer; Penambangan data; Sistem pendukung keputusan; Forensik digital; analisis data IoT.
4. Sistem Cyber-Fisik, Kontrol Industri, dan Otomasi
Ilmu jaringan dan teori kontrol terdistribusi; Jaringan sensor nirkabel; Otomatisasi pabrik; Instrumentasi industri; Diagnosis kesalahan; Perangkat dan subsistem serat optik; Sistem dan antarmuka grafis; Embedded dan sistem cyber-fisik; Algoritma terdistribusi dan bahasa pemrograman; Komputasi awan; Interaksi manusia dengan komputer.
5. Kendaraan Listrik dan Mekatronika
Sistem transportasi cerdas; Kontrol daya listrik; Kendaraan elektrik; Pemrosesan sinyal on-board; Kebijakan teknologi pemerintah.
1. Mobile Robot : AMIGO

Omron Adept AmigoBot adalah platform mobile robot penggerak diferensial yang kecil, tahan lama, dan serba guna. Robot berjalan pada standar ROS (Robot Operating System), dapat menerima perintah gerak dalam bahasa Matlab, Python, dan Java, serta menyediakan data melalui koneksi nirkabel (WiFi, IEEE 802.11).
2. Mobile Robot : PIONEER


Pioneer 3-AT adalah robot skid-steer empat roda empat motor kecil yang ideal untuk operasi segala medan atau eksperimen laboratorium. Pioneer 3-AT dilengkapi dengan satu baterai, sakelar penghenti darurat, enkoder roda, dan mikrokontroler dengan firmware ARCOS, serta paket pengembangan perangkat lunak robotika seluler canggih Pioneer SDK.
Robot penelitian perintis adalah robot seluler cerdas paling populer di dunia untuk pendidikan dan penelitian. Keserbagunaan, keandalan, dan daya tahannya telah menjadikannya platform pilihan untuk robotika cerdas tingkat lanjut. Perintis sudah dirakit sebelumnya, dapat disesuaikan dan dapat ditingkatkan, dan cukup tangguh untuk bertahan selama bertahun-tahun penggunaan laboratorium dan ruang kelas.
3. Mobile Robot : SEEKUR


Seekur adalah robot besar segala cuaca yang dapat melintasi medan terjal. Empat rodanya yang dikontrol secara independen memungkinkan kemampuan kemudi platform omnidirectional. Seekur dapat dengan mudah dilengkapi dengan muatan berat yang didukung dengan daya dan aksesibilitas I/O. Pilih dari aksesori yang tersedia atau pasang instrumen kustom Anda sendiri dengan mudah.
Robot dasar dilengkapi dengan set baterai dan sistem pengisian daya, susunan bumper tersegmentasi, sakelar penghenti darurat, unit kendali jarak jauh, dan mikrokontroler dengan firmware kendali robot SeekurOS, serta perangkat lunak pengembangan robotika seluler canggih Pioneer SDK.
Robot penelitian Adept MobileRobots adalah salah satu platform seluler cerdas paling populer di dunia untuk pendidikan dan penelitian. Keserbagunaan, keandalan, dan daya tahannya telah menjadikannya platform pilihan untuk robotika cerdas tingkat lanjut.
4. Humanoid Robot : NAO
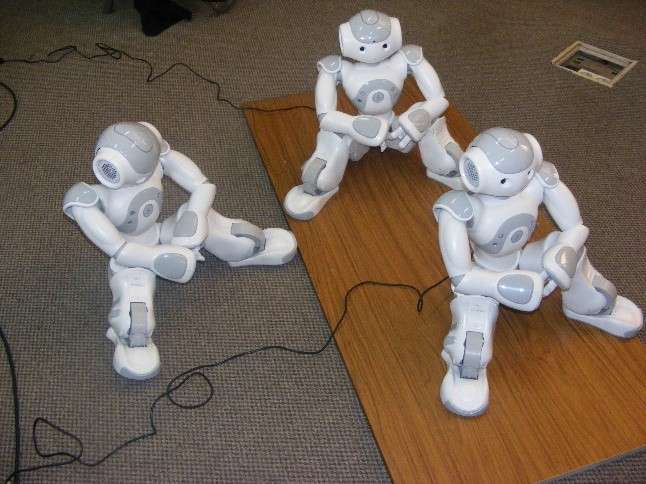

NAO adalah robot humanoid kecil yang dirancang untuk berinteraksi dengan manusia. Itu dikemas dengan sensor (dan karakter) dan dapat berjalan, menari, berbicara, dan mengenali wajah dan objek. Sekarang di generasi keenamnya, digunakan dalam penelitian, pendidikan, dan perawatan kesehatan di seluruh dunia.
5. Autonomous Underwater Vehicle (AUV)

Sebuah kendaraan bawah air otonom (AUV) adalah robot yang berjalan di bawah air tanpa memerlukan masukan dari operator. AUV merupakan bagian dari kelompok yang lebih besar dari sistem bawah laut yang dikenal sebagai kendaraan bawah air tak berawak, klasifikasi yang mencakup kendaraan bawah air yang dioperasikan dari jarak jauh (ROV) non-otonom – dikendalikan dan ditenagai dari permukaan oleh operator/pilot melalui tali pusat atau menggunakan kendali jarak jauh. Dalam aplikasi militer AUV lebih sering disebut sebagai unmanned undersea vehicle (UUV). Glider bawah air adalah subkelas dari AUV.
6. Unmanned Ground Vehicle (UGV) – Unmanned Aerial Vehicle (UAV)

Unmanned ground vehicle (UGV) adalah kendaraan yang beroperasi saat bersentuhan dengan tanah dan tanpa kehadiran manusia di dalamnya. UGV dapat digunakan untuk banyak aplikasi yang mungkin tidak nyaman, berbahaya, atau tidak mungkin ada operator manusia. Umumnya, kendaraan akan memiliki seperangkat sensor untuk mengamati lingkungan dan akan membuat keputusan tentang perilakunya secara mandiri atau meneruskan informasi tersebut ke operator manusia di lokasi berbeda yang akan mengendalikan kendaraan melalui teleoperasi.
Sebuah kendaraan udara tak berawak (UAV), umumnya dikenal sebagai drone, adalah pesawat tanpa pilot manusia, awak, atau penumpang di dalamnya. UAV adalah komponen dari sistem pesawat tak berawak (UAS), yang mencakup penambahan pengontrol berbasis darat dan sistem komunikasi dengan UAV. Penerbangan UAV dapat beroperasi di bawah kendali jarak jauh oleh operator manusia, sebagai pesawat yang dikendalikan dari jarak jauh (RPA), atau dengan berbagai tingkat otonomi, seperti bantuan autopilot, hingga pesawat yang sepenuhnya otonom yang tidak memiliki ketentuan untuk campur tangan manusia.
Ketika teknologi kontrol meningkat dan biaya turun, penggunaan UGV dan UAV diperluas ke banyak aplikasi non-militer. Ini termasuk pemantauan kebakaran hutan, foto udara, pengiriman produk, pertanian, kepolisian dan pengawasan, inspeksi infrastruktur, sains, penyelundupan, dan balap drone.
7. Batch Distillation Column

Destilasi adalah suatu cara untuk memisahkan zat kimia dari pelarutnya. Hal ini dimungkinkan karena perbedaan titik didih dan/atau tekanan uap antar zat kimia. Proses distilasi sendiri dilakukan di kolom distilasi. Perbedaan tekanan uap antara zat dan pelarut pada suhu tertentu akan mendorong kesetimbangan uap-cair, sehingga konsentrasi zat di dalam pelarut akan berubah.
Gambar ini menunjukkan studi kasus distilasi seperti yang disajikan di Laboratorium Kontrol STEI-ITB: Kolom Distilasi Batch (by Instrumen BR). Ini adalah salah satu proses penyulingan yang paling sederhana dan dengan demikian lazim di antara laboratorium sekolah. Karena sistem kontrol adalah cabang dari teknik elektro yang bertujuan untuk mengontrol proses atau pabrik untuk membantu menghasilkan hasil tertentu, beberapa metode/algoritma kontrol diterapkan pada kolom distilasi batch mini ini untuk membantu distilasi sederhana dari campuran yang mengandung suatu zat dan pelarut.
8. Process Instrumentation Trainer

Ada empat besaran fisika utama yang banyak digunakan di berbagai industri: level, laju aliran, tekanan, dan suhu.
Perangkat Process Instrumentation Trainer (by FeedBack Instrument), yang tersedia di Laboratorium Kontrol STEI-ITB, digunakan untuk memfasilitasi mahasiswa teknik elektro untuk mempelajari penerapan metode kontrol dalam proses industri kehidupan nyata. Sebagai contoh, perangkat modular ini dapat diatur menjadi sistem kontrol tingkat tinggi. Siswa dapat menerapkan metode kontrol sederhana (seperti PID) dengan menyetel Parameter PLC dan memeriksa apakah metode kontrol yang diterapkan dapat berfungsi sebagaimana mestinya (menjaga ketinggian air pada nilai setpoint tertentu).
9. Visual Tracking System
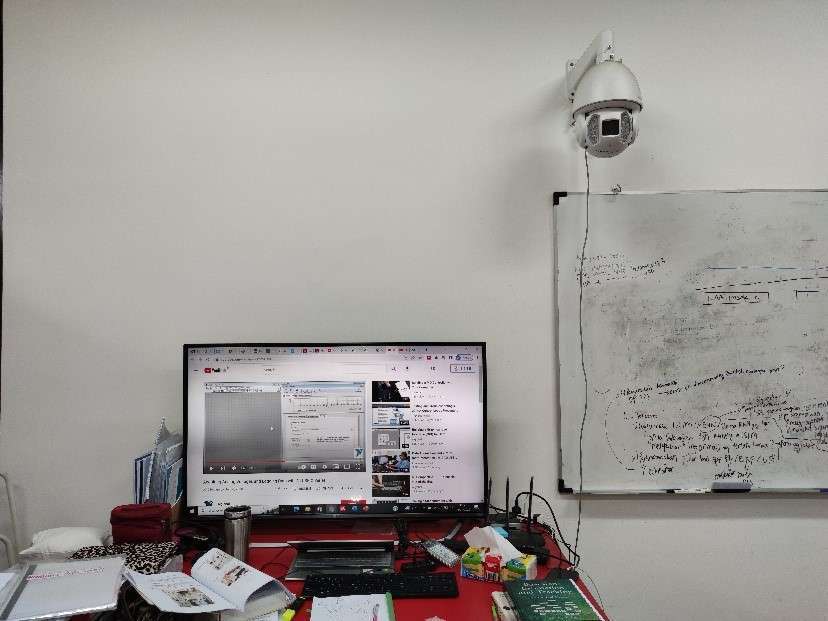
Sistem Pelacakan Visual terdiri dari platform pan-tilt dan kamera, di mana gambar diproses menggunakan komputer (dibantu oleh Unit Pemrosesan Grafis), dan tindakan gerakan diputuskan oleh metode kontrol yang diterapkan di dalam mikrokontroler.
Pekerjaan sebelumnya telah dilakukan dalam deteksi dan pelacakan wajah, pelacak objek khusus, kombinasi wajah dan postur untuk melacak manusia, dan kombinasi metode pemrosesan gambar berbasis mesin yang dapat diterapkan untuk melacak objek terkait perawatan kesehatan. Berbagai metode pembelajaran mendalam dan ekstraksi fitur digunakan untuk memproses gambar. Penelitian saat ini berfokus pada Skor Jarak Gerakan baru yang dibuat untuk memperhitungkan perpindahan objek saat melacak objek target.
- Sistem Persepsi dan Perencanaan Jalur untuk Kendaraan Otonom
- Glider Bawah Air Hibrida untuk Eksplorasi dan Pengawasan Maritim
- Koordinasi UAV-UGV untuk Pemantauan Area yang Terkontaminasi Gas Berbahaya
- Jaringan Sensor Nirkabel dan Sistem Multi-Agen untuk Pemantauan Kesehatan Jembatan
- Algoritma Fusi Multimodal dan Sistem Dialog Berbasis Reinforcement Learning dalam Interaksi Manusia-Mesin
- Detektor Multi-Box Single Shot Berbasis Particle Filter untuk Memprediksi Pergerakan Manusia
- Pendekatan Sensor Fusion dan Pembelajaran Mesin untuk Prediksi Tsunami dalam Sistem Peringatan Dini Tsunami
- Pengembangan Forklift Otonom untuk Penggunaan di Industri
- Sistem Bioreaktor Untuk Pembuatan Pupuk Cair Hayati
- Sistem Autonomous Trem: Kolaborasi Inovatif ITB-INKA
Pemerintahan
- Kementerian Kesehatan
- Badan Meteorologi, Klimatologi, dan Geofisika
- Badan Riset Inovasi Daerah Badung Bali
Industri (Swasta)
- PT. Riset Kecerdasan Buatan (PT. RKB)
- PT. Charoen Pokphand Indonesia (PT. CPI)
- PT. Robo Marine Indonesia (PT. RMI)
- Bank Indonesia (Kerma dgn LAPI)
- PT VKTR
- PT. Toyota Motor Manufaktur Indonesia (PT. TMMIN)
- PT. Toyota Astra Motor (PT TAM)
- T. HINO Motor SALES Indonesia
- PT. CARSURIN Tbk
- PT. HIOKI Indonesia (PMA)
- PT. Kendaraan Listrik Nusantara (KLN)
- PT. Insera Sena (Polygon e-bike)
|
1 |
Prof. Dr. Ir. Bambang Riyanto Trilaksono | Scopus | Sinta | Google Scholar |
|
2 |
Dr.Ir. Hilwadi Hindersah, M.Sc. | Scopus | Sinta | Google Scholar |
|
3 |
Dr.Ir. Dimitri Mahayana, M.Eng. | Scopus | Sinta | Google Scholar |
|
4 |
Ir. Arief Syaichu Rohman, M.Eng.Sc., Ph.D | Scopus | Sinta | Google Scholar |
|
5 |
Dr. Pranoto H. Rusmin, S.T., M.T. | Scopus | Sinta | Google Scholar |
|
6 |
Dr. Agung Harsoyo, S.T., M.Sc. | Scopus | Sinta | Google Scholar |
|
7 |
Egi Muhammad Idris Hidayat, S.T., M.Sc., Ph.D. | Scopus | Sinta | Google Scholar |
|
8 |
Dr. Lenni Yulianti, S.T., M.T. | Scopus | Sinta | Google Scholar |
|
9 |
Yulyan Wahyu Hadi, S.T., M.T. | Scopus | Sinta | Google Scholar |
|
10 |
Anggera Bayuwindra, S.T., M.T., Ph.D. | Scopus | Sinta | Google Scholar |
|
11 |
Indra Sihar, S.T., M.Sc., Ph.D. | Scopus | Sinta | Google Scholar |