
Selamat datang di halaman utama Control and Computer Systems Research Group (CCSRG). Kami adalah salah satu dari sembilan kelompok penelitian di Sekolah Teknik Elektro dan Informatika, Institut Teknologi Bandung (ITB). Rombongan penelitian ini saat ini dipimpin oleh Prof. Carmadi Machbub. Penelitian kelompok berfokus pada teori kontrol, aplikasi dan implementasi waktu nyata, pemodelan & simulasi, sistem cerdas, dan robotika.
Kelompok Riset Sistem Kontrol dan Komputer di ITB didirikan pada tahun 70-an untuk menangani bidang baru kontrol dan sistem komputer, yang pada pertengahan tahun 1960-an mendapat banyak perhatian. Sejak tahun 1970-an, sistem kendali dan komputer telah diajarkan pada tahun ke-2 hingga ke-4 program sarjana, dan tahun ke-1 hingga ke-2 program Magister di ITB. CCSRG juga telah mendirikan Laboratorium Penelitian Robotika Tingkat Lanjut. Dan saat ini CCSRG menampung 10 (sepuluh) dosen dan kurang lebih 30 mahasiswa S2 dan S3.
CCSRG sangat bangga dengan kualitas pendidikan, kegiatan penelitian yang kuat dan hubungan dengan industri dengan memberikan konsultasi, pelatihan, pembuatan prototipe dan merancang produk di bidang kontrol, komputer, simulasi, mekatronik dan robotika. CCSRG bekerja sama dengan Laboratorium Penelitian Robotika, Laboratorium Kontrol dan Sistem Komputer dan Pusat Studi Sistem Tak Berawak.
Bidang Penelitian:
- Robotika dan Sistem Otonom
- Kontrol dan Sistem Linier-Nonlinier
- Kontrol & Sistem Berbasis Data dan Cerdas
- Sistem Cyber-Fisik, Kontrol Industri, dan Otomasi
- Kendaraan Listrik dan Mekatronika.
Visi
Mengembangkan sumber dayanya untuk mencapai keunggulan akademik ITB dan mewujudkan perannya sebagai agen perubahan nasional.
Misi
- Mengkoordinasikan kegiatan pendidikan untuk program sarjana dan pascasarjana, penelitian dan kegiatan pemberdayaan masyarakat.
- Menciptakan pemikir yang brilian dan unggulan, pendidik, peneliti, dengan keunggulan dalam kepemimpinan dan kewirausahaan. Juga untuk menciptakan insinyur yang memiliki nilai tambah tenaga kerja.
Tugas Pokok KK
- Mengkoordinasikan kegiatan pendidikan untuk program sarjana dan pascasarjana, penelitian dan kegiatan pemberdayaan masyarakat.
- Meningkatkan dan mengembangkan ilmu pengetahuan dan teknologi dalam bidang Teknik Kendali dan Teknik Komputer.
- Mengembangkan sumber daya manusia, untuk menjadi kompetensi dalam bidang Teknik Kendali dan Teknik Komputer.
Target
- Untuk menjadi bagian strategis dari ITB dalam mencapai misi dan visinya.
- Untuk menjadi pusat pengembangan sumber daya manusia, yang sangat kompeten.
- Untuk membangun lingkungan kerja yang baik dan harmonis.
- Untuk mengembangkan rencana terpadu dan berkelanjutan jangka pendek dan jangka panjang.
Ketua KK:
Prof. Dr. Ir. Bambang Riyanto Trilaksono
Anggota:
[table id=15 /]
1. Robotika dan Sistem Otonom
Sistem otonom; Robot dan sistem multi-robot; Interaksi manusia dan robot; Koordinasi multi-agen yang tangguh; Kendaraan otonom.
2. Kontrol dan Sistem Linier-Nonlinier
Sistem kontrol; Identifikasi model sistem dinamis; Pemodelan biomimetik, dinamika, dan kontrol.
3. Kontrol & Sistem Berbasis Data dan Cerdas
Sistem kontrol cerdas; Estimasi dan kontrol keadaan yang optimal; Agen pemecahan masalah dengan algoritma pencarian; Agen berbasis pengetahuan, perencanaan, penalaran; Agen pembelajaran; Visi komputer; Penambangan data; Sistem pendukung keputusan; Forensik digital; analisis data IoT.
4. Sistem Cyber-Fisik, Kontrol Industri, dan Otomasi
Ilmu jaringan dan teori kontrol terdistribusi; Jaringan sensor nirkabel; Otomatisasi pabrik; Instrumentasi industri; Diagnosis kesalahan; Perangkat dan subsistem serat optik; Sistem dan antarmuka grafis; Embedded dan sistem cyber-fisik; Algoritma terdistribusi dan bahasa pemrograman; Komputasi awan; Interaksi manusia dengan komputer.
5. Kendaraan Listrik dan Mekatronika
Sistem transportasi cerdas; Kontrol daya listrik; Kendaraan elektrik; Pemrosesan sinyal on-board; Kebijakan teknologi pemerintah.
1. Mobile Robot : AMIGO

Omron Adept AmigoBot adalah platform mobile robot penggerak diferensial yang kecil, tahan lama, dan serba guna. Robot berjalan pada standar ROS (Robot Operating System), dapat menerima perintah gerak dalam bahasa Matlab, Python, dan Java, serta menyediakan data melalui koneksi nirkabel (WiFi, IEEE 802.11).
2. Mobile Robot : PIONEER


Pioneer 3-AT adalah robot skid-steer empat roda empat motor kecil yang ideal untuk operasi segala medan atau eksperimen laboratorium. Pioneer 3-AT dilengkapi dengan satu baterai, sakelar penghenti darurat, enkoder roda, dan mikrokontroler dengan firmware ARCOS, serta paket pengembangan perangkat lunak robotika seluler canggih Pioneer SDK.
Robot penelitian perintis adalah robot seluler cerdas paling populer di dunia untuk pendidikan dan penelitian. Keserbagunaan, keandalan, dan daya tahannya telah menjadikannya platform pilihan untuk robotika cerdas tingkat lanjut. Perintis sudah dirakit sebelumnya, dapat disesuaikan dan dapat ditingkatkan, dan cukup tangguh untuk bertahan selama bertahun-tahun penggunaan laboratorium dan ruang kelas.
3. Mobile Robot : SEEKUR


Seekur adalah robot besar segala cuaca yang dapat melintasi medan terjal. Empat rodanya yang dikontrol secara independen memungkinkan kemampuan kemudi platform omnidirectional. Seekur dapat dengan mudah dilengkapi dengan muatan berat yang didukung dengan daya dan aksesibilitas I/O. Pilih dari aksesori yang tersedia atau pasang instrumen kustom Anda sendiri dengan mudah.
Robot dasar dilengkapi dengan set baterai dan sistem pengisian daya, susunan bumper tersegmentasi, sakelar penghenti darurat, unit kendali jarak jauh, dan mikrokontroler dengan firmware kendali robot SeekurOS, serta perangkat lunak pengembangan robotika seluler canggih Pioneer SDK.
Robot penelitian Adept MobileRobots adalah salah satu platform seluler cerdas paling populer di dunia untuk pendidikan dan penelitian. Keserbagunaan, keandalan, dan daya tahannya telah menjadikannya platform pilihan untuk robotika cerdas tingkat lanjut.
4. Humanoid Robot : NAO
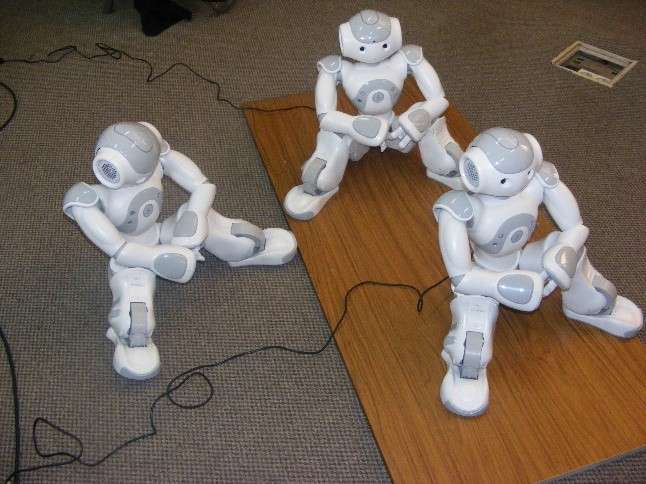

NAO adalah robot humanoid kecil yang dirancang untuk berinteraksi dengan manusia. Itu dikemas dengan sensor (dan karakter) dan dapat berjalan, menari, berbicara, dan mengenali wajah dan objek. Sekarang di generasi keenamnya, digunakan dalam penelitian, pendidikan, dan perawatan kesehatan di seluruh dunia.
5. Autonomous Underwater Vehicle (AUV)

Sebuah kendaraan bawah air otonom (AUV) adalah robot yang berjalan di bawah air tanpa memerlukan masukan dari operator. AUV merupakan bagian dari kelompok yang lebih besar dari sistem bawah laut yang dikenal sebagai kendaraan bawah air tak berawak, klasifikasi yang mencakup kendaraan bawah air yang dioperasikan dari jarak jauh (ROV) non-otonom – dikendalikan dan ditenagai dari permukaan oleh operator/pilot melalui tali pusat atau menggunakan kendali jarak jauh. Dalam aplikasi militer AUV lebih sering disebut sebagai unmanned undersea vehicle (UUV). Glider bawah air adalah subkelas dari AUV.
6. Unmanned Ground Vehicle (UGV) – Unmanned Aerial Vehicle (UAV)

Unmanned ground vehicle (UGV) adalah kendaraan yang beroperasi saat bersentuhan dengan tanah dan tanpa kehadiran manusia di dalamnya. UGV dapat digunakan untuk banyak aplikasi yang mungkin tidak nyaman, berbahaya, atau tidak mungkin ada operator manusia. Umumnya, kendaraan akan memiliki seperangkat sensor untuk mengamati lingkungan dan akan membuat keputusan tentang perilakunya secara mandiri atau meneruskan informasi tersebut ke operator manusia di lokasi berbeda yang akan mengendalikan kendaraan melalui teleoperasi.
Sebuah kendaraan udara tak berawak (UAV), umumnya dikenal sebagai drone, adalah pesawat tanpa pilot manusia, awak, atau penumpang di dalamnya. UAV adalah komponen dari sistem pesawat tak berawak (UAS), yang mencakup penambahan pengontrol berbasis darat dan sistem komunikasi dengan UAV. Penerbangan UAV dapat beroperasi di bawah kendali jarak jauh oleh operator manusia, sebagai pesawat yang dikendalikan dari jarak jauh (RPA), atau dengan berbagai tingkat otonomi, seperti bantuan autopilot, hingga pesawat yang sepenuhnya otonom yang tidak memiliki ketentuan untuk campur tangan manusia.
Ketika teknologi kontrol meningkat dan biaya turun, penggunaan UGV dan UAV diperluas ke banyak aplikasi non-militer. Ini termasuk pemantauan kebakaran hutan, foto udara, pengiriman produk, pertanian, kepolisian dan pengawasan, inspeksi infrastruktur, sains, penyelundupan, dan balap drone.
7. Batch Distillation Column

Destilasi adalah suatu cara untuk memisahkan zat kimia dari pelarutnya. Hal ini dimungkinkan karena perbedaan titik didih dan/atau tekanan uap antar zat kimia. Proses distilasi sendiri dilakukan di kolom distilasi. Perbedaan tekanan uap antara zat dan pelarut pada suhu tertentu akan mendorong kesetimbangan uap-cair, sehingga konsentrasi zat di dalam pelarut akan berubah.
Gambar ini menunjukkan studi kasus distilasi seperti yang disajikan di Laboratorium Kontrol STEI-ITB: Kolom Distilasi Batch (by Instrumen BR). Ini adalah salah satu proses penyulingan yang paling sederhana dan dengan demikian lazim di antara laboratorium sekolah. Karena sistem kontrol adalah cabang dari teknik elektro yang bertujuan untuk mengontrol proses atau pabrik untuk membantu menghasilkan hasil tertentu, beberapa metode/algoritma kontrol diterapkan pada kolom distilasi batch mini ini untuk membantu distilasi sederhana dari campuran yang mengandung suatu zat dan pelarut.
8. Process Instrumentation Trainer

Ada empat besaran fisika utama yang banyak digunakan di berbagai industri: level, laju aliran, tekanan, dan suhu.
Perangkat Process Instrumentation Trainer (by FeedBack Instrument), yang tersedia di Laboratorium Kontrol STEI-ITB, digunakan untuk memfasilitasi mahasiswa teknik elektro untuk mempelajari penerapan metode kontrol dalam proses industri kehidupan nyata. Sebagai contoh, perangkat modular ini dapat diatur menjadi sistem kontrol tingkat tinggi. Siswa dapat menerapkan metode kontrol sederhana (seperti PID) dengan menyetel Parameter PLC dan memeriksa apakah metode kontrol yang diterapkan dapat berfungsi sebagaimana mestinya (menjaga ketinggian air pada nilai setpoint tertentu).
9. Visual Tracking System
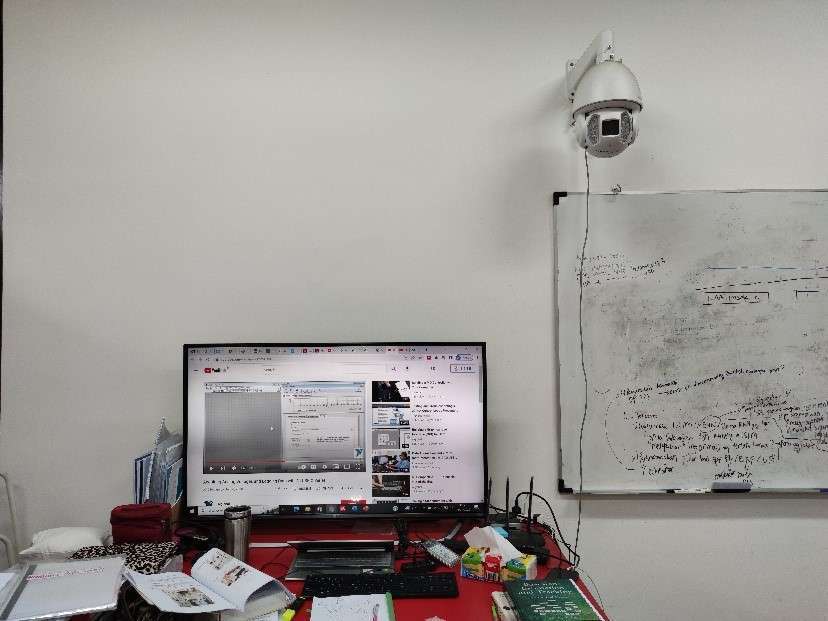
Sistem Pelacakan Visual terdiri dari platform pan-tilt dan kamera, di mana gambar diproses menggunakan komputer (dibantu oleh Unit Pemrosesan Grafis), dan tindakan gerakan diputuskan oleh metode kontrol yang diterapkan di dalam mikrokontroler.
Pekerjaan sebelumnya telah dilakukan dalam deteksi dan pelacakan wajah, pelacak objek khusus, kombinasi wajah dan postur untuk melacak manusia, dan kombinasi metode pemrosesan gambar berbasis mesin yang dapat diterapkan untuk melacak objek terkait perawatan kesehatan. Berbagai metode pembelajaran mendalam dan ekstraksi fitur digunakan untuk memproses gambar. Penelitian saat ini berfokus pada Skor Jarak Gerakan baru yang dibuat untuk memperhitungkan perpindahan objek saat melacak objek target.
Publications (2017-2022)
|
No. |
Pengarang | Judul | Sumber Judul | Tahun |
|
1 |
Prabowo, Y.A., Trilaksono, B.R., Hidayat, E.M.I., Yuliarto, B. | Utilizing a Rapidly Exploring Random Tree for Hazardous Gas Exploration in a Large Unknown Area | IEEE Access | 2022 |
|
2 |
Novianty, A., Machbub, C., Widiyantoro, S., Meilano, I., Daryono | Tsunami Potential Prediction using Seismic Features and Artificial Neural Network for Tsunami Early Warning System | International Journal on Advanced Science, Engineering and Information Technology | 2022 |
|
3 |
Mahayana, D. | Lyapunov Stability Analysis of Covid-19 SIRV Model | 2022 IEEE 18th International Colloquium on Signal Processing and Applications, CSPA 2022 – Proceeding | 2022 |
|
4 |
Putra, S.A., Trilaksono, B.R., Riyansyah, M., Laila, D.S. | Multiagent Architecture for Bridge Capacity Measurement System Using Wireless Sensor Network and Weight in Motion | IEEE Transactions on Instrumentation and Measurement | 2021 |
|
5 |
Rofi’ah, B., Fakhrurroja, H., Machbub, C. | Dialogue management using reinforcement learning | Telkomnika (Telecommunication Computing Electronics and Control) | 2021 |
|
6 |
Samman, F.A., Suhaebri, T., Sadjad, R.S., Salam, A.E.U., Achmad, A., Machbub, C. | Mppt algorithm using decremented window-scanning method for home scale photovoltaic-based power supply systems | International Journal of Innovative Computing, Information and Control | 2021 |
|
7 |
Mahayana, D., Anwari, S., Sulistyo, B., Rahman, F.N., Natanael, D.P. | Lyapunov stability analysis of covid 19 SIR modeling | International Journal on Electrical Engineering and Informatics | 2021 |
|
8 |
Mardiati, R., Trilaksono, B.R., Wibowo, S.S., Laila, D.S. | Modeling Motorcycle Maneuvering in Urban Scenarios Using Markov Decision Process with a Dynamical-Discretized Reward Field | International Journal of Automotive Technology | 2021 |
|
9 |
Wicaksa, D.P., Trilaksono, B.R., Hidayat, E.M.I. | System Design and Integration for Exploration Mission on Autonomous Underwater Glider | AIMS 2021 – International Conference on Artificial Intelligence and Mechatronics Systems | 2021 |
|
10 |
Zakaria, D., Hindersah, H., Syaichu-Rohman, A., Abdullah, A.G. | PI and PI Antiwindup Speed Control of Switched Reluctance Motor (SRM) | Proceedings – 2021 International Seminar on Intelligent Technology and Its Application: Intelligent Systems for the New Normal Era, ISITIA 2021 | 2021 |
|
11 |
Novianty, A., Meilano, I., Machbub, C., Widiyantoro, S., Susilo, S. | Rapid estimation of earthquake magnitude and source parameters using genetic algorithms | Applied Sciences (Switzerland) | 2021 |
|
12 |
Sugondo, R.A., Machbub, C. | P-Wave detection using deep learning in time and frequency domain for imbalanced dataset | Heliyon | 2021 |
|
13 |
Maharani, D.A., Machbub, C., Yulianti, L., Rusmin, P.H. | Real-time Human Tracking System using Histogram Intersection Distance in Firefly Optimization Based Particle Filter | International Journal on Electrical Engineering and Informatics | 2021 |
|
14 |
Putri, A.N., MacHbub, C., Hidayat, E.M.I. | NARX Neural Network Modeling of Batch Distillation Process | 2021 IEEE 11th International Conference on System Engineering and Technology, ICSET 2021 – Proceedings | 2021 |
|
15 |
Widiarta, G.H., Romdlony, M.Z., Rosa, M.R., Trilaksono, B.R. | Control Lyapunov – Barrier Function Implementation for Mobile Robot Model with Hardware in the Loop | Proceedings of the 2021 International Conference on Mechatronics, Robotics and Systems Engineering, MoRSE 2021 | 2021 |
|
16 |
Riyansyah, M., Wijayanto, P.B., Trilaksono, B.R., Putra, S.A., Laila, D.S. | Real time bridge dynamic response: Bridge condition assessment and early warning system | International Journal on Advanced Science, Engineering and Information Technology | 2020 |
|
17 |
Rusdi, M., Samman, F.A., Sadjad, R.S., Salam, A.E.U., MacHbub, C. | Standalone Single Phase DC-AC Inverter with FPGA-based Pulse Modulated Generator Unit | Proceedings – 2020 International Seminar on Intelligent Technology and Its Application: Humanification of Reliable Intelligent Systems, ISITIA 2020 | 2020 |
|
18 |
Fakhrurroja, H., Machbub, C., Prihatmanto, A.S., Purwarianti, A. | Multimodal interaction system for home appliances control | International Journal of Interactive Mobile Technologies | 2020 |
|
19 |
Permatasari, D.A., Fakhrurroja, H., Machbub, C. | Human-Robot Interaction Based on Dialog Management Using Sentence Similarity Comparison Method | International Journal on Advanced Science, Engineering and Information Technology | 2020 |
|
20 |
Adli, B., Rusmin, P.H. | Vibration Measuring Tools for Rotary Pumping Machine with Accelerometer MEMS Sensor | Proceeding – 1st FORTEI-International Conference on Electrical Engineering, FORTEI-ICEE 2020 | 2020 |
|
21 |
Maharani, D.A., Machbub, C., Yulianti, L., Rusmin, P.H. | Particle filter based single shot multibox detector for human moving prediction | 2020 IEEE 10th International Conference on System Engineering and Technology, ICSET 2020 – Proceedings | 2020 |
|
22 |
Retno Kinasih, F.M.T., Machbub, C., Yulianti, L., Rohman, A.S. | Extending multi-object detection ability using correlative filter | 2020 IEEE 10th International Conference on System Engineering and Technology, ICSET 2020 – Proceedings | 2020 |
|
23 |
Wibisono, R.P., Rusmin, P.H., Notodarmojo, S. | Optimization Coagulation Process of Water Treatment Plant Using Neural Network and Internet of Things (IoT) Communication | 2020 3rd International Seminar on Research of Information Technology and Intelligent Systems, ISRITI 2020 | 2020 |
|
24 |
Rusli, I., Trilaksono, B.R., Adiprawita, W. | RoomSLAM: Simultaneous localization and mapping with objects and indoor layout structure | IEEE Access | 2020 |
|
25 |
Fakhrurroja, H., Machbub, C., Prihatmanto, A.S., Purwarianti, A. | Multimodal fusion algorithm and reinforcement learning-based dialog system in human-machine interaction | International Journal on Electrical Engineering and Informatics | 2020 |
|
26 |
Wibawa, I.P.D., MacHbub, C., Rohman, A.S., Hidayat, E.M.I. | Improving Dynamic Bounding Box using Skeleton Keypoints for Hand Pose Estimation | 6th International Conference on Interactive Digital Media, ICIDM 2020 | 2020 |
|
27 |
Maharani, D.A., MacHbub, C., Rusmin, P.H., Yulianti, L. | Improving the Capability of Real-Time Face Masked Recognition using Cosine Distance | 6th International Conference on Interactive Digital Media, ICIDM 2020 | 2020 |
|
28 |
Kinasih, F.M.T.R., MacHbub, C., Yulianti, L., Rohman, A.S. | Centroid-Tracking-Aided Robust Object Detection for Hospital Objects | 6th International Conference on Interactive Digital Media, ICIDM 2020 | 2020 |
|
29 |
Prabowo, Y.A., Ranasinghe, R., Dissanayake, G., Riyanto, B., Yuliarto, B. | A Bayesian approach for gas source localization in large indoor environments | IEEE International Conference on Intelligent Robots and Systems | 2020 |
|
30 |
Lee, J., Welsan, D., Hidayat, E., Trilaksono, B.R. | Implementation of real-time monitoring system for hazardous chemical gas distribution | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
31 |
Rusmin, P.H. | Preface: Welcome to the ICSET2018 | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
32 |
Alfathdyanto, K., Febrianti, M.S., Prihatmanto, A.S., MacHbub, C. | Creating database for traditional dance categorization using CSV file format | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
33 |
Mahayana, D., Anwari, S. | Robust adaptive proportional integral sliding mode control based on synthesis of approximating state feedback for robotic manipulator | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
34 |
Ristiana, R., Rohman, A.S., Purwadi, A., MacHbub, C., Rijanto, E., Prasetyo, H.F., Santabudi, M.R.A.R. | Energy efficient speed control using IBEV model in an EV testbed platform | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
35 |
Ramelan, A., Syaichu-Rohman, A., Kelana, A. | Implementation of model predictive control on the pitch motion of train simulator platform with load torque uncertain | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
36 |
Megayanti, M., Nugraha, Y.P., Sary, I.P., Hidayat, E., Trilaksono, B.R. | Modeling and implementation of hexacopter guidance system using fuzzy logic control under wind disturbance | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
37 |
Tuasikal, D.A.A., Fakhrurroja, H., MacHbub, C. | Voice activation using speaker recognition for controlling humanoid robot | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
38 |
Najmurrokhman, A., Rohman, A.S., Rusmin, P.H. | Dissipativityof Nonlinear Networked Control Systems Modeled by Markovian Jump System | Journal of Physics: Conference Series | 2019 |
|
39 |
Adam, A.A., Haroen, Y., Purwadi, A., Rohman, A.S. | A Study of a Three Phase Induction Motor Performances Controlled by Indirect Vector and Predictive Torque Control | Proceeding – 2018 5th International Conference on Electric Vehicular Technology, ICEVT 2018 | 2019 |
|
40 |
Ristiana, R., Syichu-Rohman, A., Purwadi, A., Hindersah, H., Machbub, C., Rijanto, E. | Implementation IBEV Model and Its Speed Control Applications in Molina ITB for Energy Efficiency | Proceeding – 2018 5th International Conference on Electric Vehicular Technology, ICEVT 2018 | 2019 |
|
41 |
Handoko, A.S., Pranoto, H.R., Arief, S.R., Hidayat, E.M.I. | Mini Distillation Column Control Using Model Predictive Control | 2018 International Conference on Computer, Control, Informatics and its Applications: Recent Challenges in Machine Learning for Computing Applications, IC3INA 2018 – Proceeding | 2019 |
|
42 |
Prabowo, Y.A., Trilaksono, B.R. | Collision-free coverage control of swarm robotics based on gaussian process regression to estimate sensory function in non-convex environment | International Journal on Electrical Engineering and Informatics | 2019 |
|
43 |
Putra, S.A., Trilaksono, B.R., Riyansyah, M., Laila, D.S., Harsoyo, A., Kistijantoro, A.I. | Intelligent sensing in multiagent-based wireless sensor network for bridge condition monitoring system | IEEE Internet of Things Journal | 2019 |
|
44 |
Aripin, Riyanto, Martin, Hadi Putri, D.I., Machbub, C. | Maintaining Trajectory of CoM for Stable Locomotion of Humanoid Robot Using Kalman Filter and Fuzzy Logic Controller | Proceedings – 2019 IEEE International Conference on Signals and Systems, ICSigSys 2019 | 2019 |
|
45 |
Kusuma, M., Riyanto, Machbub, C. | Humanoid Robot Path Planning and Rerouting Using A-Star Search Algorithm | Proceedings – 2019 IEEE International Conference on Signals and Systems, ICSigSys 2019 | 2019 |
|
46 |
Saripudin, Asali, M.O., Indriyanto, T., Trilaksono, B.R. | Visual Servoing using Mixed Sensitivity H Control for Yaw-Pitch Camera Platform | Proceeding – 2019 International Conference of Artificial Intelligence and Information Technology, ICAIIT 2019 | 2019 |
|
47 |
Asali, M.O., Saripudin, Indriyanto, T., Trilaksono, B.R. | Real-Time moving object video tracking using support vector machines for visual servo application | Proceeding – 2019 International Conference of Artificial Intelligence and Information Technology, ICAIIT 2019 | 2019 |
|
48 |
Rachmatullah, M.I.C., Surendro, K., Santoso, J., Mahayana, D. | Determining the Neural Network Topology from the Viewpoint of Kuhn’s Philosophy and Popper’s Philosophy | Proceeding – 2019 International Conference of Artificial Intelligence and Information Technology, ICAIIT 2019 | 2019 |
|
49 |
Wahyudi, Khodra, M.L., Prihatmanto, A.S., Machbub, C. | Using graph pattern association rules on yago knowledge base | Journal of ICT Research and Applications | 2019 |
|
50 |
Wijiutomo, C.W., Trilaksono, B.R., Kistijantoro, A.I. | Development of Test Environment Platform for IMA using COTS components | Proceedings – 2019 International Seminar on Application for Technology of Information and Communication: Industry 4.0: Retrospect, Prospect, and Challenges, iSemantic 2019 | 2019 |
|
51 |
Riyanto, Machbub, C., Hindersah, H., Adiprawita, W. | Slope balancing strategy for bipedal robot walking based on inclination estimation using sensors fusion | International Journal on Electrical Engineering and Informatics | 2019 |
|
52 |
Azhima, S.A.T.A., Hadi, M.I., Priandiri, V.P., Trilaksono, B.R., Hidayat, E.M. | Design and simulation of navigation system for hybrid autonomous underwater glider | 2019 IEEE 9th International Conference on System Engineering and Technology, ICSET 2019 – Proceeding | 2019 |
|
53 |
Priandiri, V.P., Marham, Q.C., Trilaksono, B.R., Hidayat, E.M.I. | Control system for simplified nonlinear dynamic model of 6 DOF hybrid underwater glider using PID controller with anti-windup | 2019 IEEE 9th International Conference on System Engineering and Technology, ICSET 2019 – Proceeding | 2019 |
|
54 |
Fahmi, M.F., Rohman, A.S., Hindersah, H., Hidayat, E.M.I. | Position control of BLDC motor with nonlinear load torque in a locomotive simulator platform | 2019 IEEE 9th International Conference on System Engineering and Technology, ICSET 2019 – Proceeding | 2019 |
|
55 |
Aulia, A.I., Hindersah, H., Rohman, A.S., Hidayat, E. | Design of MPC-based motion cueing for 4 DOF simulator platform | 2019 IEEE 9th International Conference on System Engineering and Technology, ICSET 2019 – Proceeding | 2019 |
|
56 |
Saragih, C.F.D., Kinasih, F.M.T.R., MacHbub, C., Rusmin, P.H., Rohman, A.S. | Visual Servo Application Using Model Predictive Control (MPC) Method on Pan-tilt Camera Platform | Proceedings of the 2019 6th International Conference on Instrumentation, Control, and Automation, ICA 2019 | 2019 |
|
57 |
Ristiana, R., Rohman, A.S., Machbub, C., Purwadi, A., Rijanto, E. | A new approach of EV modeling and its control applications to reduce energy consumption | IEEE Access | 2019 |
|
58 |
Kinasih, F.M.T.R., Saragih, C.F.D., Machbub, C., Rusmin, P.H., Yulianti, L., Andriana, D. | State machine implementation for human object tracking using combination of mobilenet, KCF tracker, and HOG features | International Journal on Electrical Engineering and Informatics | 2019 |
|
59 |
Rusydi, M.I., Hadelina, R., Samuel, O.W., Setiawan, A.W., MacHbub, C. | Facial Features Extraction Based on Distance and Area of Points for Expression Recognition | 2019 4th Asia-Pacific Conference on Intelligent Robot Systems, ACIRS 2019 | 2019 |
|
60 |
Saripudin, Asali, M.O., Trilaksono, B.R., Indriyanto, T. | Design and implementation of moving object visual tracking system using µ-synthesis controller | Journal of ICT Research and Applications | 2019 |
|
61 |
Siregar, S., Trilaksono, B.R., Idris Hidayat, E.M., Kartidjo, M., Habibullah, N., Zulkarnain, M.F. | Simulation of Kinematic and Dynamic Models of ITB Hybrid Autonomous Underwater Glider in MOOS-IvP Application | IFAC-PapersOnLine | 2019 |
|
62 |
Mardyaningsih, W.P., Rusmin, P.H., Rahardjo, B. | Anomaly detection and data recovery on mini batch distillation column based cyber physical system | International Conference on Electrical Engineering, Computer Science and Informatics (EECSI) | 2019 |
|
63 |
Ayu, W.S., Rusmin, P.H., Hidayat, E.M.I. | Robust PID control design in CPS-based batch distillation column | International Conference on Electrical Engineering, Computer Science and Informatics (EECSI) | 2019 |
|
64 |
Harjamulya, H., Rusmin, P.H., Hidayat, E.M.I., Syaichu-Rohman, A. | Design and implementation of MPC for energy optimization of boiler in batch distillation column | International Conference on Electrical Engineering, Computer Science and Informatics (EECSI) | 2019 |
|
65 |
Ramadhani, R., Rohman, A.S., Hadi, Y.W. | Line detection using arranging coordinate point method | International Conference on Electrical Engineering, Computer Science and Informatics (EECSI) | 2019 |
|
66 |
Dirgantara, F.M., Rohman, A.S., Yulianti, L. | Object distance measurement system using monocular camera on vehicle | International Conference on Electrical Engineering, Computer Science and Informatics (EECSI) | 2019 |
|
67 |
Aulia, A.I., Faswia Fahmi, M., Hindersah, H., Rohman, A.S., Muhammad, E.I.H. | Implementation of Motion Cueing and Motor Position Control for Vehicle Simulator with 4-DOF-Platform | ICEVT 2019 – Proceeding: 6th International Conference on Electric Vehicular Technology 2019 | 2019 |
|
68 |
Irawan, H., Prihatmanto, A.S., Machbub, C., Widiyantoro, S. | Artificial neural networks (ANN)-based seismic signal source identification from MEMS accelerometer measurements | Proceeding – 2019 IEEE 7th Conference on Systems, Process and Control, ICSPC 2019 | 2019 |
|
69 |
Novianty, A., Machbub, C., Widiyantoro, S., Meilano, I., Irawan, H. | Tsunami potential identification based on seismic features using KNN algorithm | Proceeding – 2019 IEEE 7th Conference on Systems, Process and Control, ICSPC 2019 | 2019 |
|
70 |
Syahbana, D.F., Trilaksono, B.R. | MPC and Filtering-Based Energy Management in Fuel Cell/ Battery/ Supercapacitor Hybrid Source | Proceedings of the International Conference on Electrical Engineering and Informatics | 2019 |
|
71 |
Nahrendra, I.M.A., Rusmin, P.H., Hidayat, E.M.I. | Adaptive Control of Cyber-Physical Distillation Column using Data Driven Control Approach | Proceedings of the International Conference on Electrical Engineering and Informatics | 2019 |
|
72 |
Fahmi, M.F., Rohman, A.S., Hindersah, H., Hidayat, E.M.I. | Sliding Mode Position Control of BLDC Motor with Nonlinear Load Torque in a Locomotive Simulator Platform | Proceedings – 2019 2nd International Conference of Intelligent Robotic and Control Engineering, IRCE 2019 | 2019 |
|
73 |
Putra, S.A., Trilaksono, B.R., Harsoyo, A., Kistijantoro, A.I. | Multiagent system in-network processing in wireless sensor network | International Journal on Electrical Engineering and Informatics | 2018 |
|
74 |
Aziz, M.V.G., Prihatmanto, A.S., Hindersah, H. | Implementation of lane detection algorithm for self-driving car on toll road cipularang using Python language | Proceeding – 4th International Conference on Electric Vehicular Technology, ICEVT 2017 | 2018 |
|
75 |
Nugroho, T.H., Mangkusasmito, F., Trilaksono, B.R., Indriyanto, T., Yulianti, L. | Enhancing color-based particle filter algorithm with ORB feature for real-time video tracking | 2018 International Conference on Signals and Systems, ICSigSys 2018 – Proceedings | 2018 |
|
76 |
Radhiah, A., Machbub, C., Hidayat, E.M.I., Prihatmanto, A.S. | Printed Arabic letter recognition based on image | 2018 International Conference on Signals and Systems, ICSigSys 2018 – Proceedings | 2018 |
|
77 |
Mangkusasmito, F., Nugroho, T.H., Trilaksono, B.R., Indriyanto, T. | Visual servo strategies using linear quadratic Gaussian (LQG) for Yaw-Pitch camera platform | 2018 International Conference on Signals and Systems, ICSigSys 2018 – Proceedings | 2018 |
|
78 |
Putri, D.I.H., Martin, Riyanto, Machbub, C. | Object detection and tracking using SIFT-KNN classifier and Yaw-Pitch servo motor control on humanoid robot | 2018 International Conference on Signals and Systems, ICSigSys 2018 – Proceedings | 2018 |
|
79 |
Tambunan, M.H., Martin, Fakhruroja, H., Riyanto, Machbub, C. | Indonesian speech recognition grammar using Kinect 2.0 for controlling humanoid robot | 2018 International Conference on Signals and Systems, ICSigSys 2018 – Proceedings | 2018 |
|
80 |
Putri, T.W.O., Ginting, M.F., Trilaksono, B.R., Hidayat, E.M.I., Sagala, M.F. | Hardware in the loop simulation development of guidance system for autonomous underwater glider | Proceedings of the 2017 6th International Conference on Electrical Engineering and Informatics: Sustainable Society Through Digital Innovation, ICEEI 2017 | 2018 |
|
81 |
Nugraha, M.B., Taufiqurrahman, I., Trilaksono, B.R., Hidayat, E., Sagala, F. | Embedded system integration on GaneshBlue underwater Glider | 2018 International Conference on Signals and Systems, ICSigSys 2018 – Proceedings | 2018 |
|
82 |
Fadli, H., MacHbub, C., Hidayat, E. | Human gesture imitation on NAO humanoid robot using kinect based on inverse kinematics method | Proceeding – ICAMIMIA 2017: International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation | 2018 |
|
83 |
Auditia, A.I., Mahayana, D., Rusmin, P.H. | Embedded ultrasonic structural radar with fuzzy logic | Proceeding – ICAMIMIA 2017: International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation | 2018 |
|
84 |
Rodiana, I.M., Latifa, U., Trilaksono, B.R., Hidayat, E., Sagala, M.F. | Software and hardware in the loop simulation of navigation system design based on state observer using Kalman filter for autonomous underwater glider | 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications, USYS 2017 | 2018 |
|
85 |
Maharani, D.A., Fakhrurroja, H., Riyanto, Machbub, C. | Hand gesture recognition using K-means clustering and Support Vector Machine | ISCAIE 2018 – 2018 IEEE Symposium on Computer Applications and Industrial Electronics | 2018 |
|
86 |
Sitaba, A.I., Trilaksono, B.R., Hidayat, E.M.I., Sagala, M.F. | Communication system and visualization of sensory data and HILs in autonomous underwater glider | Proceedings of the 2017 6th International Conference on Electrical Engineering and Informatics: Sustainable Society Through Digital Innovation, ICEEI 2017 | 2018 |
|
87 |
Ristiana, R., Hindersah, H., Rohman, A.S., Machbub, C., Purwadi, A., Rijanto, E. | Torque control using integrated battery-electric vehicle model with flexible shaft | Proceeding – 4th International Conference on Electric Vehicular Technology, ICEVT 2017 | 2018 |
|
88 |
Prasetyo, H.F., Rohman, A.S., Hindersah, H., Santabudi, M.R.A.R. | Implementation of Model Predictive Control (MPC) in electric vehicle testing simulator | Proceeding – 4th International Conference on Electric Vehicular Technology, ICEVT 2017 | 2018 |
|
89 |
Tobing, T.L., Rachmilda, T.D., Hindersah, H., Rizqiawan, A., Haroen, Y. | Rectifier substation optimum position on DC traction systems | Proceeding – 4th International Conference on Electric Vehicular Technology, ICEVT 2017 | 2018 |
|
90 |
Santabudi, M.R.A.R., Rohman, A.S., Hindersah, H., Prasetyo, H.F. | Implementation of sliding mode control using modification of two-steps LMI approach for speed control of electric vehicle simulator | Proceeding – 4th International Conference on Electric Vehicular Technology, ICEVT 2017 | 2018 |
|
91 |
Aziz, M.V.G., Hindersah, H., Prihatmanto, A.S. | Implementation of vehicle detection algorithm for self-driving car on toll road cipularang using Python language | Proceeding – 4th International Conference on Electric Vehicular Technology, ICEVT 2017 | 2018 |
|
92 |
Maulidda, R., Rusmin, P.H., Rohman, A.S., Idris Hidayat, E.M., Mahayana, D. | Modeling and Simulation of Mini Batch Distillation Column | Proceedings of 2017 5th International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering, ICICI-BME 2017 | 2018 |
|
93 |
Rohman, A.S., Rusmin, P.H., Maulidda, R., Hidayat, E.M.I., Machbub, C., Mahayana, D. | Modelling of the mini batch distillation column | International Journal on Electrical Engineering and Informatics | 2018 |
|
94 |
Mahmoud, T., Trilaksono, B.R. | Integrated INS/GPS navigation system | International Journal on Electrical Engineering and Informatics | 2018 |
|
95 |
Sudiyanto, T., Trilaksono, B.R., Budiyono, A., Adiprawita, W. | Three-dimensional collision avoidance control for UAVs using kinematic-based collision threat situation modeling approach | International Journal on Electrical Engineering and Informatics | 2018 |
|
96 |
Ismail, Trilaksono, B.R., Adiprawita, W. | Mapping walls of indoor environment using moving RGB-D sensor | 2018 6th International Conference on Information and Communication Technology, ICoICT 2018 | 2018 |
|
97 |
Budiawan, I., Pranoto Hidayah, R., Hidayat, E.M.I., Arief Syaichu, R. | Design and implementation of cyber-physical system-based automation on plant chemical process: Study case mini batch distillation column | 2018 6th International Conference on Information and Communication Technology, ICoICT 2018 | 2018 |
|
98 |
Dwisaputra, I., Pranoto Hidaya, R., Arief Syaichu, R., Hidayat, E.M.I., Mahayana, D., Handoko, A.S. | Fuzzy Logic Controller Design and Implementation for Delayed and Nonlinear Time Variant Batch Distillation Column | Proceedings of 2017 5th International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering, ICICI-BME 2017 | 2018 |
|
99 |
Fakhrurroja, H., Riyanto, Purwarianti, A., Prihatmanto, A.S., Machbub, C. | Integration of Indonesian Speech and Hand Gesture Recognition for Controlling Humanoid Robot | 2018 15th International Conference on Control, Automation, Robotics and Vision, ICARCV 2018 | 2018 |
|
100 |
Riyanto, Adiprawita, W., Hindersah, H., Machbub, C. | Center of Mass based Walking Pattern Generator with Gravity Compensation for Walking Control on Bioloid Humanoid Robot | 2018 15th International Conference on Control, Automation, Robotics and Vision, ICARCV 2018 | 2018 |
|
101 |
Martin, Putri, D.I.H., Riyanto, Machbub, C. | Gait Controllers on Humanoid Robot Using Kalman Filter and PD Controller | 2018 15th International Conference on Control, Automation, Robotics and Vision, ICARCV 2018 | 2018 |
|
102 |
Soegiarto, D., Trilaksono, B.R., Adiprawita, W., Idris, E.M., Nugraha, Y.P. | On-line Planning on Active SLAM-Based Robot Olfaction for Gas Distribution Mapping | Proceedings – 2018 IEEE Asia-Pacific Conference on Geoscience, Electronics and Remote Sensing Technology: Best Practice for Disaster Mitigation using Geoscience, Electronic, and Remote Sensing, AGERS 2018 | 2018 |
|
103 |
Wahyudi, Khodra, M.L., Prihatmanto, A.S., Machbub, C. | A Question Answering System Using Graph-Pattern Association Rules (QAGPAR) on YAGO Knowledge Base | 2018 International Conference on Information Technology Systems and Innovation, ICITSI 2018 – Proceedings | 2018 |
|
104 |
Mardiati, R., Trilaksono, B.R., Gondokaryono, Y.S., Wibowo, S.S. | Motorcycle movement model based on markov chain process in mixed traffic | International Journal of Electrical and Computer Engineering | 2018 |
|
105 |
Utomo, R.A.B., Permana, D.A., Rusmin, P.H. | Intelligent traffic light control system at two intersections using adaptive neuro-fuzzy inference system (ANFIS) method | Earth and Space 2018: Engineering for Extreme Environments – Proceedings of the 16th Biennial International Conference on Engineering, Science, Construction, and Operations in Challenging Environments | 2018 |
|
106 |
Rahmadika, S., Rusmin, P.H., Hindersah, H., Rhee, K.H. | Providing data integrity for container dwelling time in the seaport | Proceedings – 2016 6th International Annual Engineering Seminar, InAES 2016 | 2017 |
|
107 |
Aulya, R., Hindersah, H., Prihatmanto, A.S., Rhee, K.H. | An authenticated passengers based on dynamic QR Code for Bandung Smart Transportation Systems | Proceedings – 2016 6th International Annual Engineering Seminar, InAES 2016 | 2017 |
|
108 |
Yolanda, D., Hindersah, H., Hadiatna, F., Triawan, M.A. | Implementation of real-time fuzzy logic control for NFT-based hydroponic system on Internet of Things environment | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
109 |
Rusmin, P.H. | Preface | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
110 |
Prasetyo, H.F., Rohman, A.S., Hariadi, F.I., Hindersah, H. | Controls of BLDC motors in electric vehicle testing simulator | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
111 |
Triawan, M.A., Hindersah, H., Yolanda, D., Hadiatna, F. | Internet of Things using publish and subscribe method cloud-based application to NFT-based hydroponic system | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
112 |
Hadiatna, F., Hindersah, H., Yolanda, D., Triawan, M.A. | Design and implementation of data logger using lossless data compression method for Internet of Things | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
113 |
Mochammad, F., Putra, A.R., Trilaksono, B.R. | Implementation of hazardous chemical gas monitoring system using unmanned aerial vehicle (UAV) | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
114 |
Handaya, D., Fakhruroja, H., Hidayat, E.M.I., Machbub, C. | Comparison of Indonesian speaker recognition using vector quantization and Hidden Markov Model for unclear pronunciation problem | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
115 |
Auditia, A.I., Rusmin, P.H. | Structure health monitoring using fourier transform and neural network | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
116 |
Andriana, A.S., Prihatmanto, D., Hidaya, E.M.I., Supriana, I., Machbub, C. | Contiguous Uniform Deviation for Multiple Linear Regression in Pattern Recognition | Journal of Physics: Conference Series | 2017 |
|
117 |
Hidayat, F., Trilaksono, B.R., Hindersah, H. | Distributed Multi Robot Simultaneous Localization and Mapping with Consensus Particle Filtering | Journal of Physics: Conference Series | 2017 |
|
118 |
Purwadi, A., Rizqiawan, A., Hariyanto, D., Pribadi, J., Hindersah, H., Haroen, Y. | Analysis of power converters for high frequency resonant inductive electric vehicle charging system | 3rd IEEE Conference on Power Engineering and Renewable Energy, ICPERE 2016 | 2017 |
|
119 |
Adiwilaga, A., Taufikurrahman, I., Hidayat, E., Trilaksono, B.R. | Design of a modular, compact, long endurance autonomous underwater vehicle with gliding capabilities for research purpose operations | 2017 2nd International Conference on Control and Robotics Engineering, ICCRE 2017 | 2017 |
|
120 |
Latifa, U., Putri, T.W.O., Trilaksono, B.R., Hidayat, E.M.I. | Modelling, identification, and simulation of autonomous underwater glider in longitudinal plane for control purpose | 2017 2nd International Conference on Control and Robotics Engineering, ICCRE 2017 | 2017 |
|
121 |
Ristiana, R., Rohman, A.S., Purwadi, A., Machbub, C. | Integrated battery-electric vehicle model and its optimal speed control application | 2017 3rd International Conference on Control, Automation and Robotics, ICCAR 2017 | 2017 |
|
122 |
Mardiati, R., Trilaksono, B.R., Gondokaryono, Y.S., Sulaksono, S.S. | Motorcycle’s trajectory tracking model based on polynomial least-squares approximation | Advanced Science Letters | 2017 |
|
123 |
Nugraha, Y.P., Ridlwan, H.M., Riansyah, M.I., Trilaksono, B.R. | Autonomous tracking of hexacopter on moving mobile robot using Gazebo ROS simulation | ACM International Conference Proceeding Series | 2017 |
|
124 |
Ridlwan, H.M., Nugraha, Y.P., Riansyah, M.I., Trilaksono, B.R. | Simulation of vision-based for automatic takeoff and landing hexacopter on a moving ground vehicle | ACM International Conference Proceeding Series | 2017 |
|
125 |
Riansyah, M.I., Nugraha, Y.P., Ridlwan, H.M., Trilaksono, B.R. | 3D mapping hexacopter simulation using gazebo and robot operating sytem (ROS) | ACM International Conference Proceeding Series | 2017 |
|
126 |
Chesire, A., Nur, H., Santoso, S.J., Trilaksono, B.T., Lopez, H.S. | Selected peer-reviewed articles from the international seminar on new paradigm and innovation of natural sciences and its application (ISNPINSA), Semarang, Indonesia, 5–6 October, 2016 | Advanced Science Letters | 2017 |
|
127 |
Mahayana, D. | Sliding mode control based on synthesis of approximating state feedback for robotic manipulator | International Journal on Electrical Engineering and Informatics | 2017 |
|
128 |
Benyamin, R.S.B., Nugroho, M.A.A., Sepri, A.Y., Trilaksono, B.R., Moelyadi, A. | Dynamic modeling using system identification and attitude control design of GaneFly flapping wings micro aerial vehicle (FWMAV) | 2017 7th IEEE International Conference on System Engineering and Technology, ICSET 2017 – Proceedings | 2017 |
|
129 |
Nugroho, M.A.A., Sepri, A.Y., Benyamin, R.S.B., Trilaksono, B.R., Moelyadi, A. | Design and implementation of attitude stabilization on Ganefly flapping wings micro aerial vehicle using Paparazzi | 2017 7th IEEE International Conference on System Engineering and Technology, ICSET 2017 – Proceedings | 2017 |
|
130 |
Yosafat, S.R., Machbub, C., Hidayat, E.M.I. | Design and implementation of Pan-Tilt control for face tracking | 2017 7th IEEE International Conference on System Engineering and Technology, ICSET 2017 – Proceedings | 2017 |
|
131 |
Andaste, Y.S., Nugroho, M.A.A., Benyamin, R.S.B., Trilaksono, B.R., Moelyadi, A. | Design and construction of flapping wing micro aerial vehicle robot platform | 2017 7th IEEE International Conference on System Engineering and Technology, ICSET 2017 – Proceedings | 2017 |
|
132 |
Ristiana, R., Rohman, A.S., Purwadi, A., Machbub, C. | Energy efficient torque control using integrated battery-electric vehicle model | 2017 7th IEEE International Conference on System Engineering and Technology, ICSET 2017 – Proceedings | 2017 |
|
133 |
Ananda, W., Cahyadi, S.A., Inayaturohman, I., Hamdani, D. | The effect of the grounding condition of line impedance stabilization network on the measurement validity of conducted emission parameter | International Conference on High Voltage Engineering and Power Systems, ICHVEPS 2017 – Proceeding | 2017 |
|
134 |
Dwisaputra, I., Hidaya, P.R., Hidayat, E.M.I., Syaichu, A.R., Mahayana, D. | Design and implementation of density sensor with flow rate as disturbance | Proceedings – 2017 International Seminar on Sensor, Instrumentation, Measurement and Metrology: Innovation for the Advancement and Competitiveness of the Nation, ISSIMM 2017 | 2017 |
|
135 |
Wahyudi, Khodra, M.L., Prihatmanto, A.S., Machbub, C. | Knowledge-based graph compression using graph property on Yago | Proceeding – 2017 3rd International Conference on Science in Information Technology: Theory and Application of IT for Education, Industry and Society in Big Data Era, ICSITech 2017 | 2017 |
|
136 |
Apriaskar, E., Nugraha, Y.P., Trilaksono, B.R. | Simulation of simultaneous localization and mapping using hexacopter and RGBD camera | Proceedings of the 2nd International Conference on Automation, Cognitive Science, Optics, Micro Electro-Mechanical System, and Information Technology, ICACOMIT 2017 | 2017 |
|
137 |
Sobirin, M., Hindersah, H. | Stability Control for Bipedal Robot in Standing and Walking using Fuzzy Logic Controller | Proceedings – 2021 IEEE International Conference on Industry 4.0, Artificial Intelligence, and Communications Technology, IAICT 2021 | 2021 |
|
138 |
Pohan, M.A.R., Trilaksono, B.R., Santosa, S.P., Rohman, A.S. | Path Planning Algorithm Using the Hybridization of the Rapidly-Exploring Random Tree and Ant Colony Systems | IEEE Access | 2021 |
|
139 |
Kinasih, F.M.T.R., MacHbub, C., Yulianti, L., Rohman, A.S. | Application of ID Assignment Features in Rosebrocks’ Simple Object Tracker | 2021 IEEE 11th International Conference on System Engineering and Technology, ICSET 2021 – Proceedings | 2021 |
|
140 |
Maharani, D.A., MacHbub, C., Rusmin, P.H., Yulianti, L. | Feature Fusion with Deep Neural Network in Kernelized Correlation Filters Tracker | 2021 IEEE 11th International Conference on System Engineering and Technology, ICSET 2021 – Proceedings | 2021 |
|
141 |
Putra, A.A.G.J., Trilaksono, B.R., Hidayat, E.M.I. | Hybrid Autonomous Underwater Glider (HAUG) Obstacle Detection and Avoidance | 2021 IEEE 11th International Conference on System Engineering and Technology, ICSET 2021 – Proceedings | 2021 |
|
142 |
Saputro, J.S., Rusmin, P.H., Rochman, A.S. | Design and implementation of trajectory tracking motion in mobile robot skid steering using model predictive control | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
143 |
Sary, I.P., Nugraha, Y.P., Megayanti, M., Hidayat, E., Trilaksono, B.R. | Design of obstacle avoidance system on hexacopter using vector field histogram-plus | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
144 |
Aulia, A.I., Rata, N.P.A.K., Amin, M., Hindersah, H., Hidayat, E. | Throttle, motion cueing, and platform control systems of 3-DOF locomotive simulator | ICSET 2018 – 2018 IEEE 8th International Conference on System Engineering and Technology, Proceedings | 2019 |
|
145 |
Susanti, N.D., Rohman, A.S., Rusmin, P.H., Pristianto, E.J. | Design of Ethanol Concentration Measurement System Using Specific Gravity Approach for Batch Distillation Column Automation | Proceedings – 2019 International Conference on Radar, Antenna, Microwave, Electronics, and Telecommunications, ICRAMET 2019 | 2019 |
|
146 |
Maharani, D.A., MacHbub, C., Rusmin, P.H. | Enhancement of Missing Face Prediction Algorithm with Kalman Filter and DCF-CSR | Proceedings of the International Conference on Electrical Engineering and Informatics | 2019 |
|
147 |
Kusumasari, T.F., Trilaksono, B.R., Aisha, A.N., Fitria | Software development team competencies to support software development project success | International Journal of Engineering and Technology(UAE) | 2018 |
|
148 |
Fadli, H., Hidayat, E., Machbub, C. | Design and implementation of walking pattern and trajectory compensator of NAO humanoid robot | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
149 |
Marzuki, Hidayat, E.M., Munir, R., Setijadi, P.A., Machbub, C. | Scenes categorization based on appears objects probability | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
150 |
Wandarosanza, R., Trilaksono, B.R., Hidayat, E. | Hardware-in-the-loop simulation of UAV Hexacopter for chemical hazard monitoring mission | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
151 |
Satriawan, Y.S., Machbub, C., Hidayat, E.M.I. | Comparison of prediction methods for moving objects in 3D coordinates using Kalman Filter and least square | Proceedings of the 2016 6th International Conference on System Engineering and Technology, ICSET 2016 | 2017 |
|
152 |
Yusra, Fikry, M., Trilaksono, B.R., Yendra, R., Fudholi, A. | Music interest classification of twitter users using support vector machine | Journal of Theoretical and Applied Information Technology | 2017 |
|
153 |
Andriana, D., Prihatmanto, A.S., Hidayat, E.M.I., Machbub, C. | Combination of face and posture features for tracking of moving human visual characteristics | International Journal on Electrical Engineering and Informatics | 2017 |
|
154 |
Hidayat, F., Trilaksono, B.R., Hindersyah, H. | Distributed multi-robot rao-blackwellized particle filtering simultaneous localization and mapping with consensus calculation of particle weight and posterior parameters | International Journal on Electrical Engineering and Informatics | 2017 |